随着国家制造工业的不断进步与发展,智能智造是发展的必然趋抛,越来越多的企业在结构焊接生产中利用自动化焊接生产,大大提高生产效率。企业面临生产模式的转型改变,配合自动化焊接的焊接夹具的合理设计也显得尤其重要。今天作为一家从事了十余年焊接夹具设计的专业焊接工装服务商跟大家解读偏向怎样设计焊接工装夹具?需要注意的地方有哪些呢?

1、焊接机器人焊接具有动作迅速、操作方便的特点,故焊接平台应处于机械手及工作人员容易接近,易操作的位置。当机械手焊接夹具处于夹紧状态时,应能自锁。
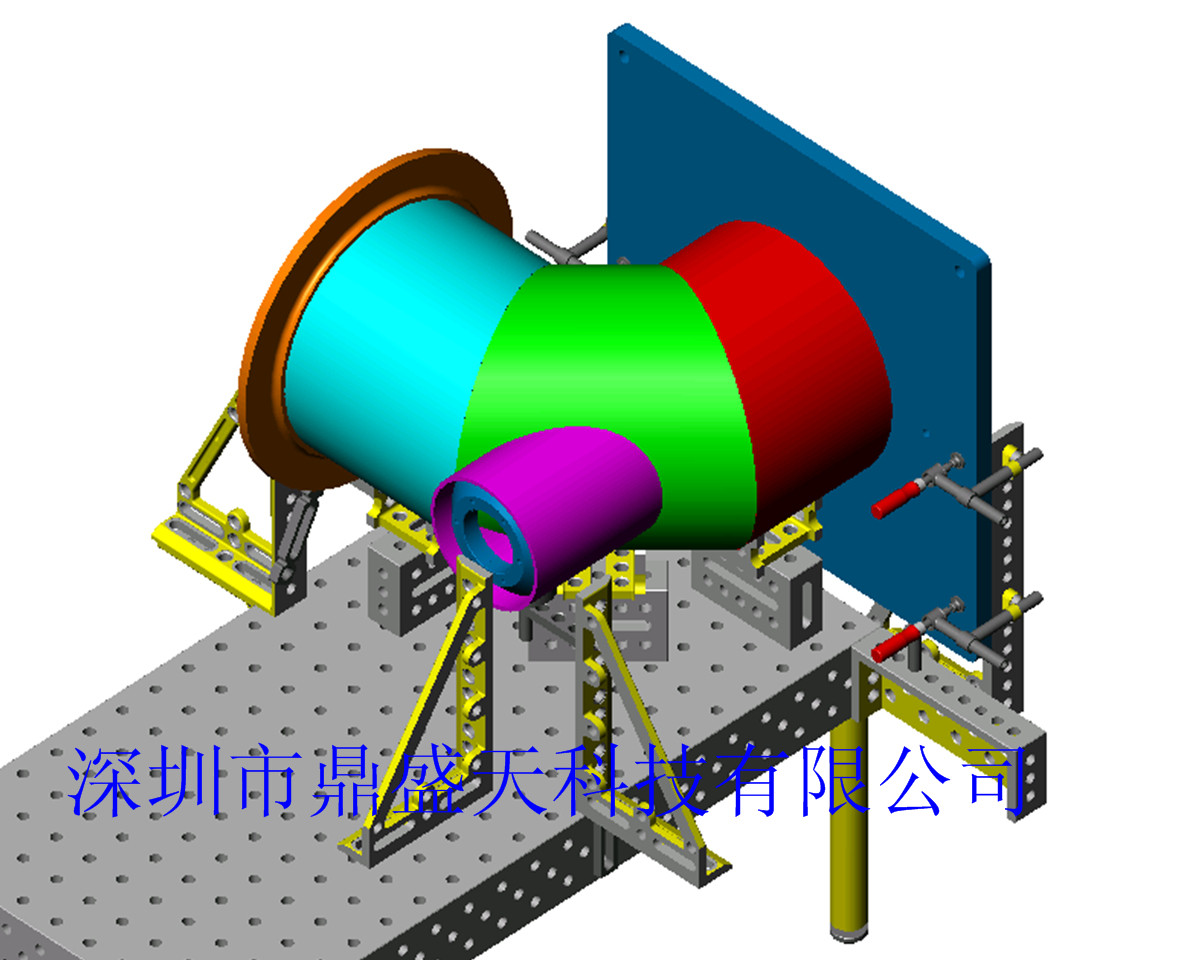
2、整套夹具应用足够的装配、焊接空间,所有的定位件和夹紧件与焊道应保持适当的距离。
3、焊接工装夹具需夹紧可靠,结构稳定。夹紧时不会破坏焊接的定位位置和几何形状,不应破坏焊件的表面质量,根据工件厚度调整适当的夹紧力度,或采取压头行程限位,扩大压头的接触面积。避免让焊件产生过大的应力。
4、焊接夹具的施力点应位于焊件的支承处或其靠近支承处,控制焊件的变形量。
5、为了便于控制,在同一套夹具上尽量选用标准通用的定位元件和夹紧件,结构形式不宜过多,方便更换产品规格型号打样试制或生产时重新组装定位。

深圳市鼎盛天科技DCT品牌焊接工装专注专业大型吊臂、塔吊、桁架等的焊...
选择一家适合的焊接工装夹具厂家(深圳鼎盛天科技)可以让您的焊接 工...
DCT品牌焊接工装15年的焊接工装夹具案例积累,15年的品牌沉淀,用心做好...
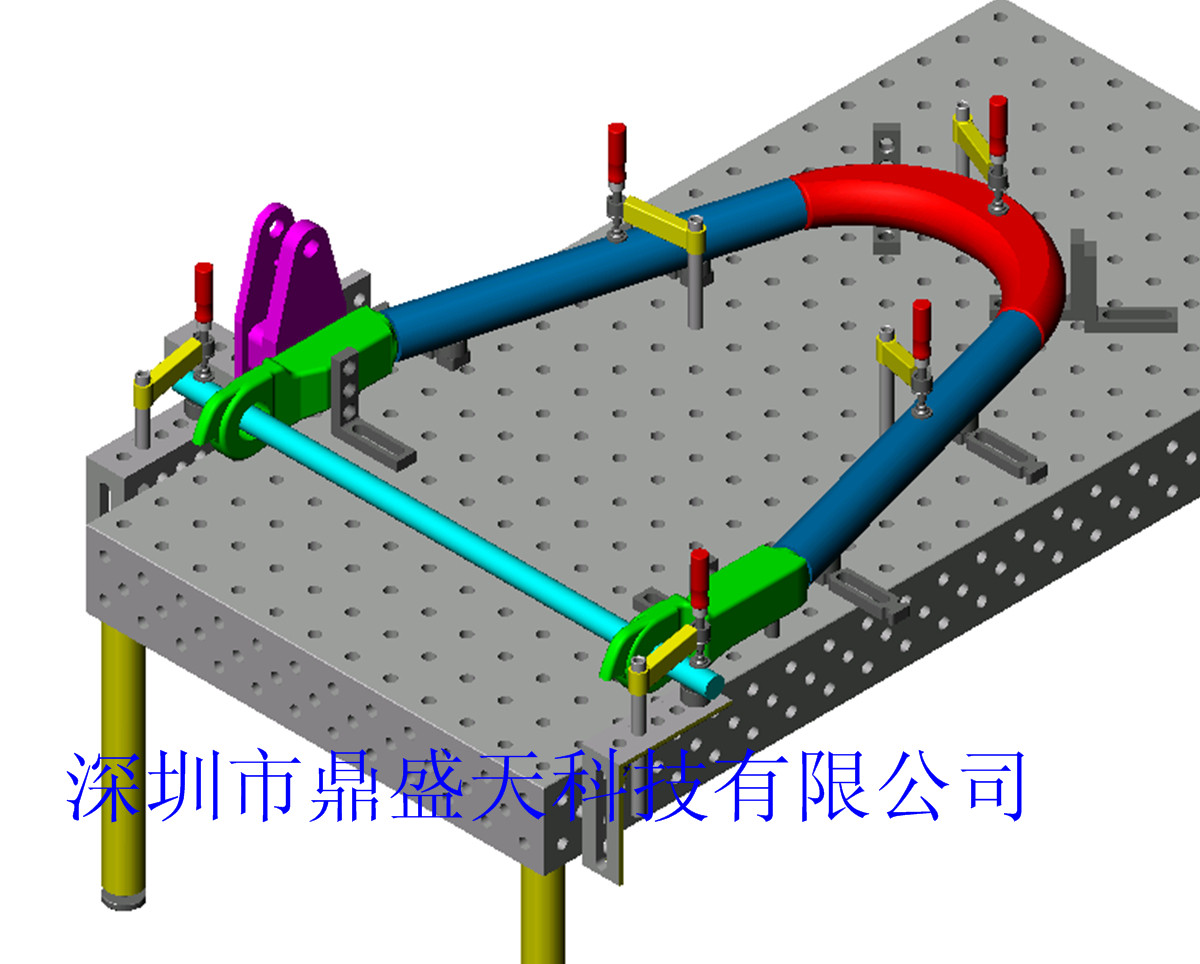
深圳市鼎盛天科技DCT品牌三维柔性焊接工装夹具是您完成各种异型管道焊...
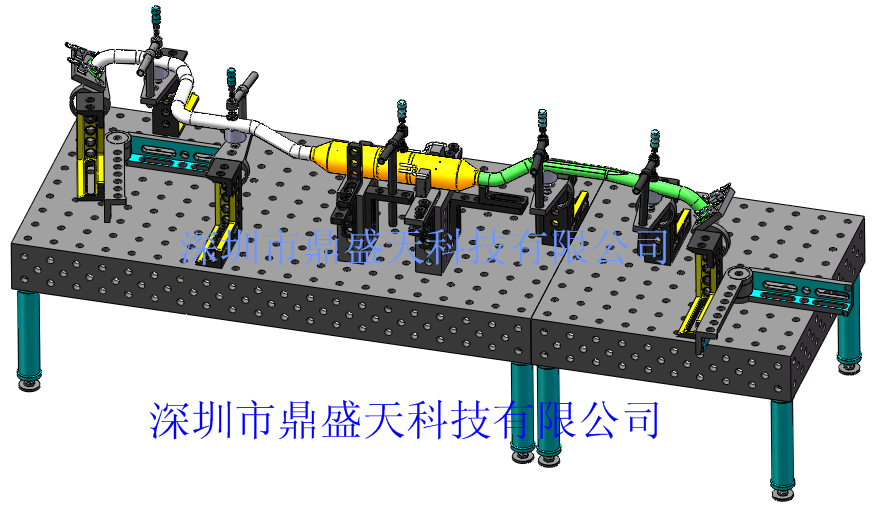
深圳鼎盛天15年老品牌焊接工装夹具厂家话你知三维柔性焊接工装夹具的...
© 2018 深圳市鼎盛天科技有限公司版权所有
粤ICP备12007843号-1
 粤公网安备 44030902001111号
法律声明
网站地图
网站设计
粤公网安备 44030902001111号
法律声明
网站地图
网站设计


